
濟(jì)南恒信新能源汽車教學(xué)設(shè)備
一站式采購加工 運(yùn)營18年 質(zhì)量保證

全國客服熱線:
0531-88914116
13455126350
0531-88914116
13455126350
價(jià)格:1.06-3.90萬/臺
功能:無人駕駛環(huán)境感知實(shí)訓(xùn)教學(xué)
產(chǎn)品型號:hx-wrjshjgzsxpt-06*89
廠家定制:可加工定制
起訂量:1臺起
作者:汽車教具 來源:無人駕駛汽車教學(xué)設(shè)備
發(fā)布時(shí)間:2020-01-13 17:26:15 閱讀次數(shù):54
電話:13455126350
汽車無人駕駛環(huán)境感知實(shí)訓(xùn)平臺基于自身的駕駛性能和共識規(guī)則,它可以識別和計(jì)劃實(shí)時(shí),可靠和準(zhǔn)確的駕駛路線,從而確保以標(biāo)準(zhǔn)化,下面小編為您詳細(xì)介紹!
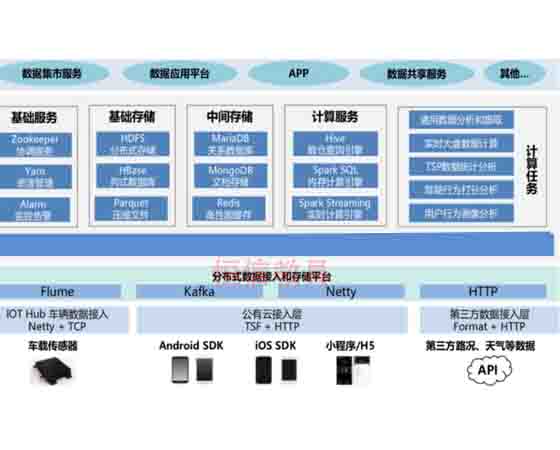
無人駕駛環(huán)境感知實(shí)訓(xùn)平臺的無人系統(tǒng)包括多個(gè)傳感器,例如長距離和短距離毫米波雷達(dá),激光雷達(dá),單眼和雙目照相機(jī),超聲波,GPS定位,陀螺儀慣性導(dǎo)航等,每個(gè)傳感器以不同的頻率采樣并生成數(shù)據(jù)。
該系統(tǒng)對傳感器數(shù)據(jù)的處理具有很強(qiáng)的實(shí)時(shí)性要求,因此要求無人駕駛系統(tǒng)能夠以分布式異步實(shí)時(shí)方式處理這些數(shù)據(jù)。其次,基于這些傳感器數(shù)據(jù)的融合,無人駕駛系統(tǒng)感知并提取駕駛環(huán)境元素,并做出導(dǎo)航和自動(dòng)駕駛決策。這要求系統(tǒng)具有強(qiáng)大的計(jì)算能力,能夠集成高性能算法并具有高可伸縮性。
常用的車載外部傳感器各有特點(diǎn),例如,毫米波雷達(dá)可以準(zhǔn)確檢測前方車輛的距離和速度,并且具有很強(qiáng)的穿透霧氣,煙霧和灰塵的能力;攝像頭視覺系統(tǒng)可以獲取車道線和交通信號等。目標(biāo)的顏色和形狀等細(xì)節(jié)用于進(jìn)行詳細(xì)識別。
激光雷達(dá)使用點(diǎn)云構(gòu)建周圍環(huán)境的3D模型,該模型可以檢測包括車輛,行人,樹木和路邊的細(xì)節(jié)。通過激光雷達(dá)或毫米波雷達(dá)與視覺傳感器的融合,不僅可以檢測目標(biāo)物體,還可以執(zhí)行諸如目標(biāo)空間測距和目標(biāo)圖像識別之類的功能,同樣,GPS定位、視覺傳感器和激光雷達(dá)的集成可以實(shí)現(xiàn)保持車道所需的高精度定位,還可以檢測多種類型的障礙物目標(biāo)。
在構(gòu)建典型的環(huán)境傳感系統(tǒng)時(shí),常用的傳感器包括攝像頭和激光雷達(dá)等傳感器。例如,Velodyne Lidar獲取用于定位和地圖構(gòu)建的三維點(diǎn)云數(shù)據(jù),還可以測量車輛與周圍物體之間的距離;盡管傳感器的垂直分辨率低于Velodyne Lidar,但它們可以產(chǎn)生較長的3D點(diǎn)云數(shù)據(jù)。
激光雷達(dá)傳感器生成短距離二維激光掃描數(shù)據(jù),通常用于緊急停車,而不是用于定位和地圖創(chuàng)建;紅外熱像儀可用于目標(biāo)檢測,點(diǎn)灰熱像儀具有360度全向覆蓋范圍,熱像儀具有單一方向和高運(yùn)行幀率。前者可用于檢測運(yùn)動(dòng)物體,而后者可用于識別交通信號燈。 定位傳感器接收衛(wèi)星全球定位信息,經(jīng)常使用陀螺儀傳感器和里程表,修正定位信息。
1.微波感應(yīng):基于微波雷達(dá)獲取車輛周圍環(huán)境的二維或三維距離信息,并通過距離分析和識別技術(shù)感知行車環(huán)境;
優(yōu)點(diǎn):可以直接高精度地獲取物體的三維距離信息,對光照環(huán)境的變化不敏感,實(shí)時(shí)性好,體積小;
缺點(diǎn):如果沒有距離差異,就不可能感知到飛機(jī)上的目標(biāo)信息,國外的成熟產(chǎn)品也被禁運(yùn)到中國,并且很難獲得;
2.視覺傳感:基于機(jī)器視覺獲取車輛周圍環(huán)境的二維或三維圖像信息,并通過圖像分析和識別技術(shù)感知駕駛環(huán)境;
優(yōu)點(diǎn):信息豐富,實(shí)時(shí)性好,體積小,能耗低;
缺點(diǎn):容易受到光線環(huán)境的影響,3D信息測量精度低;
3.通信傳感器:基于無線,網(wǎng)絡(luò)等近距離和遠(yuǎn)距離通信技術(shù),獲取車輛周圍環(huán)境信息;
優(yōu)點(diǎn):可以獲取其他傳感方法難以實(shí)現(xiàn)的宏觀駕駛環(huán)境信息,可以在車輛之間共享信息,并且對環(huán)境干擾不敏感;
缺點(diǎn):無法用于車輛的自主導(dǎo)航控制的信息不夠直接,實(shí)時(shí)性能不高,并且無法感知到周圍車輛以外的其他物體的信息;
4.激光感應(yīng):基于激光雷達(dá)獲取車輛周圍環(huán)境的二維或三維距離信息,并通過距離分析和識別技術(shù)感知駕駛環(huán)境;
優(yōu)點(diǎn):可以直接獲取物體的三維距離信息,測量精度高。它對照明環(huán)境的變化不敏感。車載雷達(dá)可以彌補(bǔ)激光發(fā)射器的一些盲點(diǎn),可以準(zhǔn)確地獲得汽車的相對速度;
缺點(diǎn):無法感知平面目標(biāo)信息而沒有距離差異,體積大,價(jià)格昂貴,并且不便于車輛集成;
以上內(nèi)容就是介紹的無人駕駛環(huán)境感知實(shí)訓(xùn)平臺:http://m.tea818.com/xb-wr/556.html,希望對訂購無人駕駛汽車實(shí)訓(xùn)平臺的朋友們有所幫助,可能會(huì)出現(xiàn)介紹錯(cuò)誤,看到請馬上聯(lián)系我們改正,想了解其中更多內(nèi)容以及行情資訊,歡迎收藏本站,也可電話聯(lián)系我們索要設(shè)備的功能參數(shù)等,或者直接實(shí)地考察,也可電話微信溝通訂購等!




添加微信
可微信咨詢
全國免費(fèi)服務(wù)熱線
134-5512-6350