濟(jì)南恒信新能源汽車教學(xué)設(shè)備
一站式采購加工 運(yùn)營18年 質(zhì)量保證

全國客服熱線:
0531-88914116
13455126350
0531-88914116
13455126350
價格:1.19-4.6萬/臺
功能:目標(biāo)檢測、教學(xué)等
產(chǎn)品型號:hx-znwlqcjxyjpt-16.7.8
廠家定制:加工定制
起訂量:1臺起
作者:汽車教具 來源:無人駕駛汽車教學(xué)設(shè)備
發(fā)布時間:2020-04-20 14:37:14 閱讀次數(shù):147
電話:13455126350
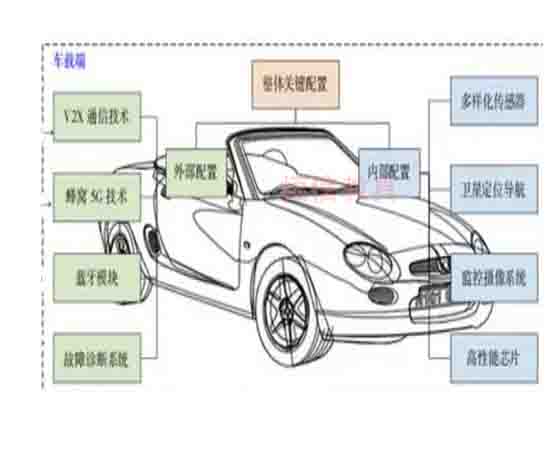
智能物網(wǎng)聯(lián)汽車教學(xué)研究平臺是基于高性能數(shù)字信號處理器的機(jī)器視覺研究平臺,包括圖像處理基本算法驗(yàn)證平臺、道路環(huán)境模擬系統(tǒng)(Avida TX2),下面由小編為大家詳細(xì)介紹!
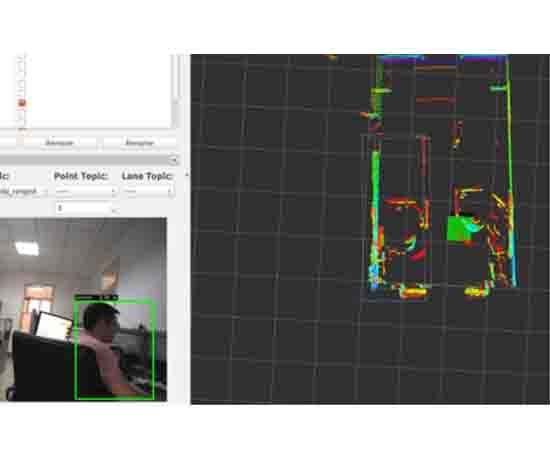
機(jī)器視覺研究平臺可以提供車輛、行人和道路邊緣的檢測、定位和跟蹤等應(yīng)用案例作為實(shí)驗(yàn),為研究和學(xué)習(xí)提供便利。通過實(shí)驗(yàn)操作,我們可以學(xué)習(xí)建立視覺應(yīng)用系統(tǒng)所需的各種硬件、方法和圖像處理技術(shù),同時對無人駕駛中的視覺目標(biāo)檢測和判定過程有了深入的了解和掌握。該平臺具有開放的結(jié)構(gòu),提供了擴(kuò)展的接口,還可以添加自己的圖像處理算法。
該激光雷達(dá)研究平臺包括TX2 ARM架構(gòu)下的雷達(dá)驅(qū)動、雷達(dá)數(shù)據(jù)DBC分析和雷達(dá)識別結(jié)果可視化等基本功能。德爾福的電子自旋共振毫米波雷達(dá)有中距離和遠(yuǎn)距離兩種工作模式。通過兩種模式的結(jié)合,可以輸出64個目標(biāo)。目標(biāo)屬性包括位置、距離、速度和加速度。毫米波識別具有傳感距離遠(yuǎn)、抗干擾能力強(qiáng)、與視覺傳感器融合、目標(biāo)結(jié)果更加穩(wěn)定等優(yōu)點(diǎn)。毫米波雷達(dá)將識別結(jié)果作為獨(dú)立的節(jié)點(diǎn)輸出,各個傳感模塊相互獨(dú)立,便于融合工作。
用戶需要使用多線激光雷達(dá)來學(xué)習(xí)激光雷達(dá)數(shù)據(jù)擬合和三維場景重建技術(shù)。
激光雷達(dá)研究平臺包括傳感器驅(qū)動、點(diǎn)云分析、目標(biāo)識別、地圖柵格化和場景重建功能。該平臺以Verodain的16線激光雷達(dá)為傳感器輸入,通過自動軟件下的驅(qū)動和分析節(jié)點(diǎn),以主題格式發(fā)布點(diǎn)云數(shù)據(jù)。激光雷達(dá)定位精度高,能在傳感器融合中為目標(biāo)提供深度信息,便于后續(xù)的傳感任務(wù),如目標(biāo)跟蹤和姿態(tài)估計(jì),也可用于導(dǎo)航任務(wù),如2D光柵化地圖和三維地圖重建定位。
局部路徑規(guī)劃:主要是檢測障礙物,跟蹤障礙物的運(yùn)動軌跡,計(jì)算下一個可能的位置,最后繪制包含現(xiàn)有碰撞風(fēng)險和潛在碰撞風(fēng)險的障礙物地圖。局部路徑規(guī)劃的前提是對當(dāng)前環(huán)境的感知和深刻理解。局部路徑規(guī)劃算法包括人工勢場法、DWA法(動態(tài)窗口法),PRM等。
全局路徑規(guī)劃:首先建立環(huán)境模型(拓?fù)浼壄h(huán)境圖),在此基礎(chǔ)上進(jìn)行最優(yōu)路徑搜索,形成全局路徑規(guī)劃。環(huán)境模型有三種類型,即網(wǎng)格法、可視法和自由空間法。路徑搜索算法包括Dijkstra、Floyd-Warshall、A*,層次法、動作行為法、勢場法、罰函數(shù)法和仿生算法如遺傳算法、模擬退火法、蟻群算法等。
軌跡規(guī)劃:在全局路徑規(guī)劃和局部路徑規(guī)劃的基礎(chǔ)上,考慮時間序列和車輛動力學(xué)來規(guī)劃車輛軌跡,最終設(shè)定車輛的縱向加速度和橫向角速度。軌跡規(guī)劃方法可分為模型預(yù)測控制和幾何軌跡規(guī)劃方法。
路徑規(guī)劃是無人駕駛算法中最復(fù)雜的部分。它分為全局路徑規(guī)劃、局部路徑規(guī)劃(動態(tài)路徑規(guī)劃)和路徑規(guī)劃。路徑規(guī)劃平臺提供了從環(huán)境建模到路徑規(guī)劃的基本案例,為初學(xué)者理解和掌握無人路徑規(guī)劃的基本過程以及學(xué)習(xí)和使用路徑規(guī)劃的基本算法奠定了基礎(chǔ)。
硬件設(shè)備層由智能無人車、中型無人車和模擬城市道路設(shè)施組成,智能無人車搭載基于新能源車體的先進(jìn)激光雷達(dá)、導(dǎo)航定位、雙目攝像機(jī)和線控設(shè)備;中型無人駕駛車輛裝載智能無人駕駛車輛所需的所有智能設(shè)備;模擬的城市道路設(shè)施通過控制系統(tǒng)形成集成控制平臺;實(shí)驗(yàn)教學(xué)層按照感知識別、決策規(guī)劃、無人駕駛車輛控制與執(zhí)行、城市道路智能控制與實(shí)訓(xùn)三個模塊開展教學(xué)工作
以上內(nèi)容就是介紹的智能網(wǎng)聯(lián)汽車教學(xué)研究平臺:http://m.tea818.com/xb-wr/648.html,希望對訂購智能網(wǎng)聯(lián)汽車平臺的朋友們有所幫助,介紹出現(xiàn)錯誤可能在所難免,還請朋友們幫忙改正,想了解其中更多內(nèi)容以及行情資訊,歡迎收藏本站,也可電話了解,或者直接實(shí)地考察,也可電話微信溝通訂購!




添加微信
可微信咨詢
全國免費(fèi)服務(wù)熱線
134-5512-6350